GearInPos (fliegende Säge)
Sehen Sie hierzu das Beispiel BasicMotion_GearInPos.project im Installationsverzeichnis von CODESYS unter ..\CODESYS SoftMotion\Examples.
Dieses Beispiel zeigt die Verwendung von MC_GearInPos zur Realisierung einer fliegenden Säge. Für dieses Projekt empfehlen wir den CODESYS Depictor zu installieren, der die Anwendung als 3D-Animation darstellen kann. (Dazu genügt die lizenzfreie kostenlose Variante)
Aufbau der Applikation
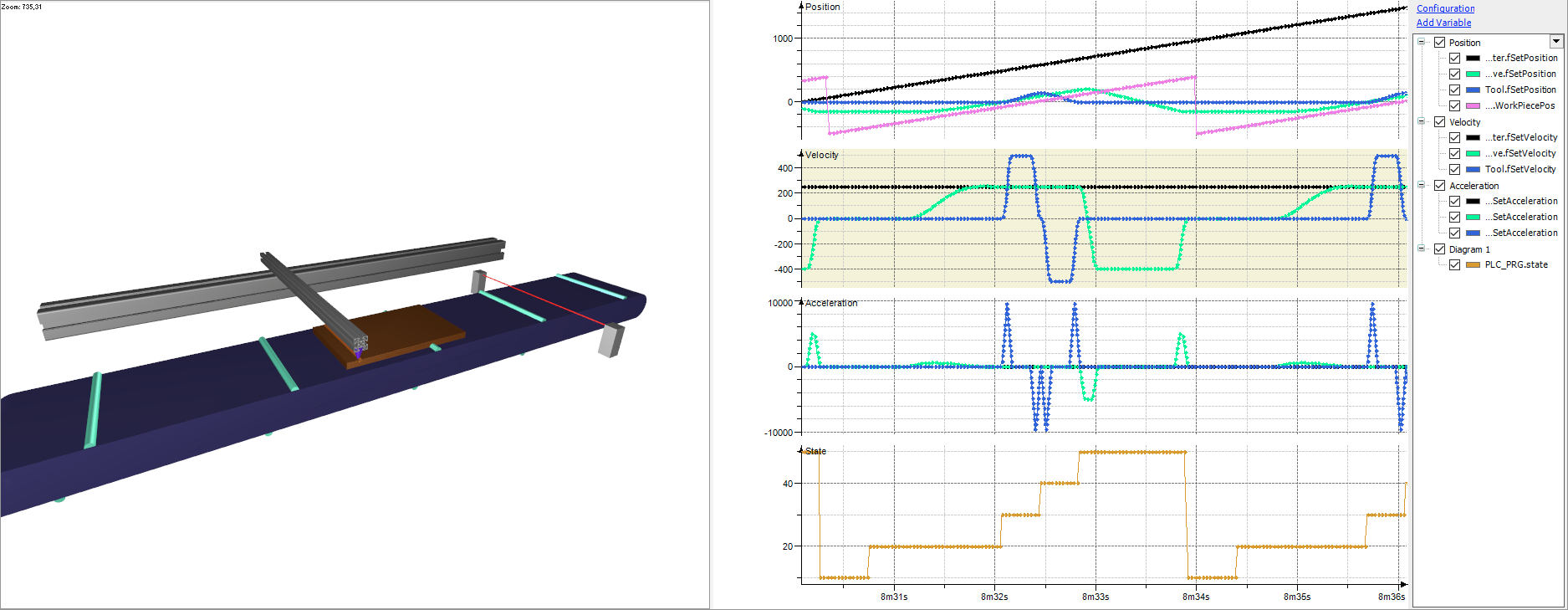
Die Applikation besteht aus einer Zustandsmaschine im Programm PLC_PRG, einer 3D-Darstellung (Scene, Programm DepictorCalculation), einer einfachen Teile-Simulation (Programm SimulateWorkpiece) und einem Trace, mit dem Sie den Effekt der Funktionsbausteine nachvollziehen können.
Der Ablauf in PLC_PRG ist wie folgt:
Freigabe der Achsen mit
MC_Power. (STATE_POWER)Warten, bis die Lichtschranke ein Werkstück erkennt (
STATE_WAIT_FOR_WORKPIECE)Sobald die Lichtschranke ein Werkstück erkennt, wird der Slave, der die Säge parallel zum Band transportiert, mit dem Werkstück auf dem Band synchronisiert (gesteuert von der Achse
Master),STATE_WAIT_FOR_SYNC)Wenn die Synchronisation erreicht ist, wird die Säge senkrecht zum Werkstück einmal vor und zurückgefahren (
STATE_MOVE_TOOL_0/1)Fahren des Slaves in die Ruheposition und Ablauf erneut bei 2. beginnen (
STATE_MOVE_TO_REST)
Koordinatensysteme und Dimensionen
Der Ursprung des Koordinatensystems liegt in der Mitte des Bands, die Z-Achse zeigt nach oben, die X-Achse zeigt in Bewegungsrichtung des Förderbandes. Die Y-Achse zeigt vom Förderband aus weg von der Säge.
Die Dimensionen von Band und Werkstück, die Position der Lichtschranke und die Position, an dem die Säge synchron zum Werkstück läuft, sind in der GVL Const als Konstanten hinterlegt.
Verwendung
Starten Sie die Applikation. Im Depictor-Objekt Szene und im Trace können Sie nachvollziehen, wie die Synchronisation zwischen Master (Werkstück auf dem Band) und Slave (Säge) abläuft.